


Questa pagina è stata scritta molti anni fa e quindi non posso più fornire alcun supporto
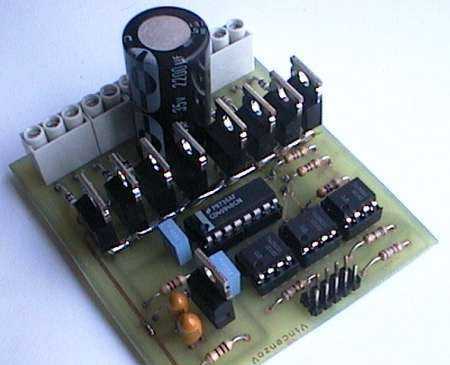
Questo circuito permette di comandare attraverso la porta parallela del PC otto interruttori di potenza capaci a loro volta di gestire carichi di diversi ampere con tensioni di alimentazione fino a 50V. Il circuito è, per motivi di sicurezza, isolato otticamente dal PC.
Una classica applicazione è quella di pilotare una coppia di motori passo-passo unipolari (da cui il "titolo" della pagina) ma è adatto anche per accendere otto lampadine oppure otto motori in continua.
Il meccanismo adottato nella connessione al PC permette di collegare fino a sei di questi circuiti ad un'unica porta parallela, per un totale di 12 motori passo-passo oppure 48 lampadine. Per la descrizione dell'interfaccia digitale vi rimando alla pagina in cui descrivo iso-buffer. Per una trattazione approfondita del funzionamento dei motori passo, vi rimando al tutorial presente su https://www.vincenzov.net.
Il breve software di esempio, di cui fornisco sia l' eseguibile che il codice sorgente, permette di testare il funzionamento di una coppia di motori passo passo in ambiente Windows. Sono basati sulle librerie del progetto VVIO.
Si noti che per il collegamento di questo circuito alla porta parallela è necessario cablare un apposito cavo oppure realizzare un apposito circuito stampato. La descrizione dettagliata di come fare queste operazioni la trovate un un'apposita pagina
Il circuito è progettato per pilotare carichi che richiedono una tensione di alimentazione continua compresa tra 14 e 50V (con qualche accorgimento è anche possibile usare tensioni di alimentazioni inferiori), con una corrente massima per canale di 5A (anche se le piste del circuito stampato sono dimensionate per 10A continui complessivi). Vi consiglio di non utilizzare alimentatori stabilizzati: basta un semplice trasformatore, un ponte a diodi ed un condensatore elettrolitico di capacità adeguata (un migliaio di uF per ogni ampere) oppure una batteria da 12 o 24V. Si ricordi che l'assorbimento di corrente e la tensione di alimentazione sono abbastanza elevati e quindi occorre un minimo di attenzione nel maneggiare il circuito. In particolare non collegate o scollegate il circuito alla sorgente di alimentazione in presenza di tensione, pena scintille particolarmente intense e poco "igieniche" per i dispositivi elettronici.
I MOS determinano la tensione di alimentazione e la massima corrente gestibile dal circuito. Le caratteristiche necessarie sono innanzitutto il tipo (canale N), il contenitore (TO220), la disposizione dei pin (1-gate, 2-drain, 3-source). Si tratta della tipologia di MOS di potenza più diffusa.
La tensione di alimentazione del circuito deve essere superiore alla tensione di soglia dei MOS + 3 volt. Usando MOS "normali" (p.e. IRF540) la tensione minima di alimentazione del circuito è quindi di 13-14 Vcc ed i valori indicati sullo schema sono corretti.
Se la tensione di alimentazione è inferiore, fino a 8V o anche qualcosa meno, è necessario:
Il valore massimo della Vcc dipenda dal MOS (è normale trovarne da centinaia di volt...) ma anche dagli altri componenti, in particolare il regolatore di tensione ed i condensatori elettrolitici C1 e C5: ciò limita di fatto l'uso del circuito a 50V.
Il MOS determina anche la massima corrente che può essere erogata al carico. Il problema in realtà non dipende tanto dalla massima corrente del componente (facile trovare MOS da molte decine di A) quanto dalla massima potenza gestibile senza dissipatore: per fare ciò occorre scegliere componenti con una Rds-on sufficientemente bassa.
Per esempio IRF540, un tipico MOS in contenitore TO220 da 30A/100V, ha le seguenti caratteristiche:
Questo implica che la massima dissipazione a 50°C è di quasi 2W, pari ad una corrente massima continua di circa 5A. Tale valore è ovviamente fortemente dipendente dai parametri del MOS, in particolare la Rds-on.
Un altro elemento critico quando si usano carichi fortemente induttivi sono gli otto diodi messi in parallelo al carico: essi proteggono il MOS dalle sovratensioni di apertura. Debbono avere le seguenti caratteristiche:
La scelta del componente potrebbe presentare qualche difficoltà ma il problema più grosso è trovarlo in commercio: io ho recuperato in un mercatino un pacco di non meglio precisati diodi per alimentatori a commutazione... Un consiglio: meglio un comunissimo 1N4007 (comunque troppo lento) che nulla.
Infine C5. Sarebbe meglio usare un condensatore a basso ESR ma, non avendone, va bene anche un elettrolitico "normale". La capacità deve essere abbastanza elevata ma non è critica; sono invece importanti la tensione di lavoro (se bassa rischia di scoppiare, facendo un gran botto) e la dimensione fisica (il circuito stampato è un po' sacrificato...).
| C1 | 22 uF - 63 Vl - Elettrolitico o tantalio |
| C2,C3 | 220 nF |
| C4 | 10 uF - Elettrolitico o tantalio |
| C5 | 1000 uF - 63 Vl - Elettrolitico |
| D1,D2,D3,D4,D5,D6,D7,D8 | Diodo veloce (vedi testo) |
| ISO1,ISO2,ISO3 | 6N135 - Optoisolatore |
| JP1,JP2 | Connettore 5 poli - passo 5mm |
| JP3 | Connettore 5x2 poli - passo 2.54 mm |
| J1 | Connettore 2 poli - passo 5mm |
| Q1,Q2,Q3,Q4,Q5,Q6,Q7,Q8 | IRF540 - MOS di potenza a canale N (vedi testo) |
| R1,R3,R5 | 180 ohm |
| R2,R4,R6 | 4k7 (vedi testo) |
| R7 | 100 ohm |
| R8 | 220 ohm (vedi testo) |
| R9 | 1k8 (vedi testo) |
| U1 | CD4094B - Registro a scorrimento CMOS |
| U2 | LM317HV - Regolatore di tensione |
Se la tensione di alimentazione è inferiore a 30V la tensione di lavoro dei condensatori può essere ridotta (anche se consiglio comunque un discreto margine di sicurezza) ed è possibile usare un LM317 "normale".
Il circuito stampato è a doppia faccia. Ovviamente non ho utilizzato fori metallizzati, non realizzabili dall'hobbista; è però necessario inserire in tre punti un piccolo filo per collegare i due lati (una "via" artigianale) nonché realizzare le saldature di alcuni componenti su entrambi i lati del circuito stampato. Osservando il circuito stampato è possibile individuare quali sono le saldature da fare sul lato superiore, in corrispondenza dei diodi, dei transistor e di alcune resistenze.
Per facilitare il montaggio consiglio di non seguire la solita logica di iniziare dai componenti più "bassi" ma di usare il seguente ordine per evitare difficoltà nelle operazioni di saldature sul lato superiore:
Osservando il lato superiore dello stampato si nota che esistono ben pochi collegamenti. Volendo è possibile realizzare il circuito come singola faccia e fare questi collegamenti con fili "volanti": in particolare gli otto catodi dei diodi e gli otto source dei MOS possono essere saldati ad un filo di adeguato spessore semplicemente appoggiato sul lato superiore dello stampato.
Il software, lo schema elettrico del circuito ed il PCB sono contenuti nel file unipolar.tgz
| licenza | La licenza d'uso che ho utilizzato |
| schematic.pdf | Lo schema elettrico del circuito, in formato PDF |
| top.pdf | Circuito stampato lato componenti, in formato PDF |
| bottom.pdf | Circuito stampato lato saldature, in formato PDF |
| assembly.pdf | Layout di assemblaggio, in formato PDF |
| LW_CVI | Software per pilotare due motori passo-passo in ambiente Windows |
Per realizzare questo circuito è necessario disporre dei seguenti file:
Sono inoltre presenti sul sito www.vincenzov.net altri circuiti per il pilotaggio di motori passo-passo o carichi di potenza:
Prima di realizzare il circuito o utilizzare il software è inoltre necessario leggere le avvertenze generali.
Step Driver - Versione 1.0a - Agosto 2003
Copyright © 2003, Vincenzo Villa
La licenza d'uso da leggere ed accettare prima di utilizzare il prodotto
Tutti i nomi di prodotti e ditte sono proprietà dei legittimi proprietari.
Questo documento è disponibile nella sua forma integrale sul sito https://www.vincenzov.net.
