

In questa pagina Arduino è utilizzato come master e come slave SPI.
L'obbiettivo è analizzare i segnali trasmessi e ricevuto utilizzando un oscilloscopio dotato di almeno 4 canali e strumenti di decodifica dei segnali seriali, per esempio Picoscope 3405A o 2205A MSO, entrambi prodotti da Pico Technology. Per chi non dispone di tale strumento, a fondo pagina sono presenti alcuni esempi.
Se volete utilizzare ESP8266: Laboratorio SPI
Per questa prima attività ci servirà solo Arduino che useremo come master, senza collegare alcuna periferica; ci limiteremo ad osservare con l'oscilloscopio i segnali MOSI, CLK e SS durante la trasmissione di un byte.
Il software farà uso delle librerie SPI.
Il codice dovrà inizialmente configurare SPI (SPISettings()), possibilmente all'interno di beginTransaction(). Prima di trasmettere il singolo byte occorrerà inoltre attivare SS (un pin qualunque, in genere attivo basso) e appena terminata la trasmissione disattivarlo.
Il byte letto è casuale, non essendoci nessun segnale collegato a MISO.
Cosa succede se si collega direttamente MISO a MOSI (loopback)?
Collegare una periferica SPI ed analizzare i segnali scambiati. Ovviamente librerie e procedure dipendono dal tipo di dispositivo utilizzato; qui, per esempio, è utilizzato nRF24L01+.
I segnali SPI sono presenti anche sul connettore GPIO di Raspberry Pi. La scheda RPi demo può ospitare due dispositivi SPI: un ADC ed un modulo a radiofrequenza nRF24L01+, ciascuno collegato ai due SS presenti sul connettore GPIO.
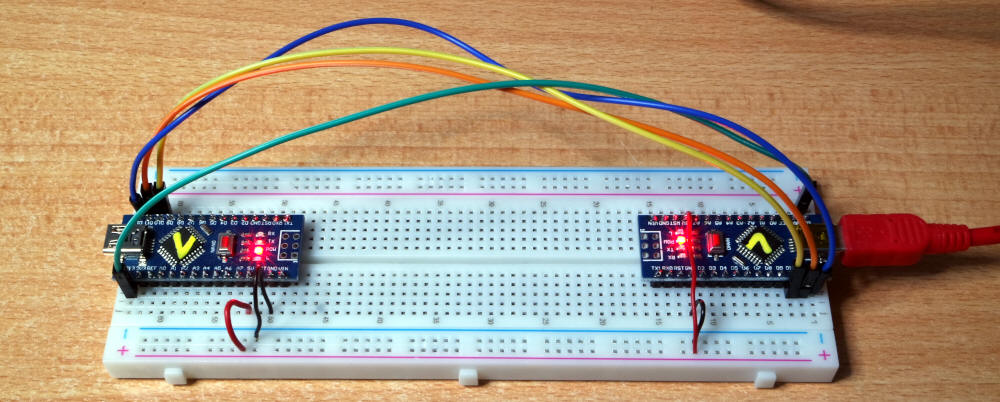
Collegare due Arduino, uno configurato come controller ed uno come periferica, e trasmettere dati in modo bidirezionale. L'immagine di apertura mostra due Arduino Nano collegati tra di loro.
Il collegamento è tra pin omonimi, senza "incrociare" nulla:
La parte complessa è scrivere il codice per l'Arduino che assume il ruolo di periferica: non esistono infetti librerie standard che permettono ciò. Di seguito un codice minimale (nota 3) e, a seguire, una breve spiegazione delle criticità.
#include<SPI.h>
volatile boolean datoPronto;
volatile byte ricevutoDalController;
byte risposta;
void setup() {
Serial.begin(115200);
pinMode(MISO, OUTPUT);
pinMode(MOSI, INPUT);
pinMode(SS, INPUT);
pinMode(SCK, INPUT);
SPCR = SPCR | (1 << SPE);
datoPronto = false;
SPI.attachInterrupt();
}
ISR (SPI_STC_vect) {
ricevutoDalController = SPDR;
datoPronto = true;
}
void loop() {
if (datoPronto) {
Serial.print("Byte trasmesso: ");
Serial.println(risposta);
Serial.print("Byte ricevuto dal controller: ");
Serial.println(ricevutoDalController);
Serial.println();
datoPronto = false;
SPDR = risposta--;
}
}
I pin dei segnali devono essere configurati manualmente come ingressi ed uscite, in base al verso dei segnali mostrato in questo schema, in pratica il contrario di quando fatto automaticamente dalle librerie SPI.
Il modulo SPI di Arduino è controllato dal registro a 8 bit SPCR (nota 2):

Per i nostri scopi sono significativi i seguenti bit:
Possiamo lasciare al valore di default (0) DORD, CPOL e CPHA se, come in genere avviene, vogliamo utilizzare MSBFIRST e SPI_MODE0.
Attiveremo l'interrupt (SPIE) con l'apposito metodo
I due bit che gestiscono il clock sono ignorati in quanto il clock è generato dal controller.
Come in genere avviene nei programmi che ricevono dati in modo asincrono, la ricezione è gestita interamente dall'hardware che avverte con un interrupt (nota) la presenza di un nuovo dato.
Le ISR (Interrupt Service Routine) di Arduino sono individuate dalla parola chiave ISR e sono vettorizzate, cioè ne esiste una diversa per ciascuna periferica. Essa viene "agganciata" all'hardware con il metodo attachInterrupt().
Da notare che le variabili globali modificate all'interno della ISR sono definite come volatili.
Questo registro è utilizzato in due modi:
L'immagine seguente mostra i segnali SPI visti con un oscilloscopio e la relativa decodifica:
Il file SPI.zip contiene quattro diversi esempi da utilizzare con la versione demo di Picoscope. Per tutti sono visibili i segnali MISO, MOSI (nota 4), Clock e SS:
Pagina creata nel marzo 2022
Ultima modifica: 1 maggio 2022
Appunti scolastici - Versione 0.1033 - Marzo 2026
Copyright 2012-2026, Vincenzo Villa (https://www.vincenzov.net)
![]()
Creative Commons | Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)
